
- Afhalen na 1 uur in een winkel met voorraad
- Gratis thuislevering in België vanaf € 30
- Ruim aanbod met 7 miljoen producten
- Afhalen na 1 uur in een winkel met voorraad
- Gratis thuislevering in België vanaf € 30
- Ruim aanbod met 7 miljoen producten






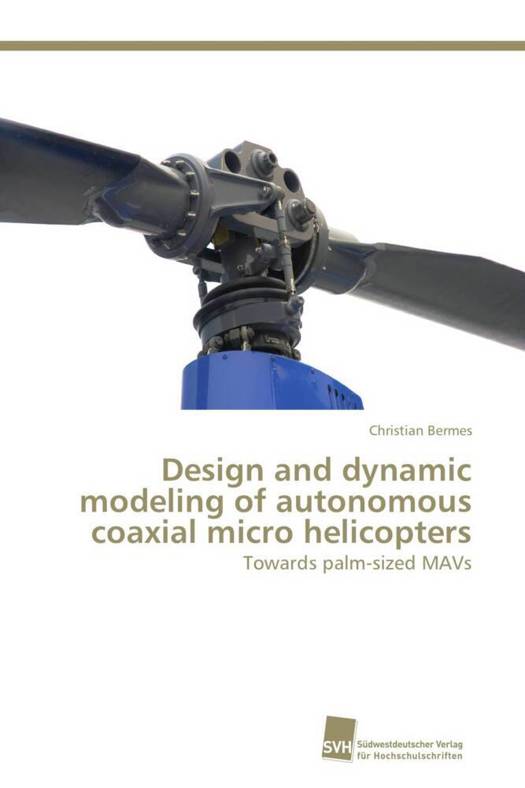
Design and dynamic modeling of autonomous coaxial micro helicopters
Towards palm-sized MAVs
Christian Bermes
Paperback | Engels
€ 78,95
+ 157 punten
Omschrijving
This book is a result of the European framework project muFly, aiming at the design and realization of an autonomous micro helicopter comparable to a small bird in size and mass. It introduces two prototype designs for the muFly helicopter: a modular one for fast sensor and actuator exchange and easy configuration testing, and a highly integrated design to reduce the total mass and integrate the complete sensor set for autonomous flight. Furthermore, a theoretical foundation for coaxial micro helicopter design is laid. In particular focus are passive stabilization and steering principles of the helicopter. A modular dynamic model is developed, which incorporates the characteristics of a hingeless rotor system, two optional steering principles, and a stabilizer bar module, which is also validated experimentally. Finally, the dynamic model is used for a design parameter study of the most relevant system design parameters. It aims at passive roll and pitch stabilization of the helicopter without a stabilizer bar. By illuminating the aspects of prototype design, dynamic modeling, simulation, and design parameter optimization, this book is a contribution towards palm-sized MAVs.
Specificaties
Betrokkenen
- Auteur(s):
- Uitgeverij:
Inhoud
- Aantal bladzijden:
- 176
- Taal:
- Engels
Eigenschappen
- Productcode (EAN):
- 9783838121987
- Verschijningsdatum:
- 29/06/2012
- Uitvoering:
- Paperback
- Formaat:
- Trade paperback (VS)
- Afmetingen:
- 152 mm x 229 mm
- Gewicht:
- 267 g


Alleen bij Standaard Boekhandel
+ 157 punten op je klantenkaart van Standaard Boekhandel
E-BOOK ACTIE


Beoordelingen
We publiceren alleen reviews die voldoen aan de voorwaarden voor reviews. Bekijk onze voorwaarden voor reviews.